En 1961, Tom Rogers, de la agencia Leo Burnett, creó el atún Charlie, un pez de dibujos animados que hablaba en broma y era la mascota de la marca StarKist. La popular campaña publicitaria duró varias décadas, y su eslogan «Lo siento, Charlie» enganchó rápidamente en el léxico estadounidense.
Cuando la Oficina de Tecnologías y Programas Avanzados de la CIA comenzó a realizar algunas investigaciones centradas en los peces en la década de 1990, Charlie debió parecer el nombre en clave perfecto. Excepto que el «Charlie de la CIA» era un pez gato… y además, era un robot.
Más concretamente, Charlie era un vehículo submarino no tripulado (UUV) diseñado para recoger subrepticiamente muestras de agua. Su piloto controlaba al pez a través de un aparato de radio en la línea de visión. No se ha revelado mucho sobre la construcción del pez, salvo que su cuerpo contenía un casco presurizado, un sistema de lastre y un sistema de comunicaciones, mientras que su cola albergaba la propulsión.
Para explorar entornos acuáticos, nada mejor que un robot submarino
La CIA no fue la única que utilizó los UUV, ni siquiera la primera agencia en hacerlo. En Estados Unidos, este tipo de investigación comenzó en serio en la década de 1950, con la financiación por parte de la Marina de Estados Unidos de la tecnología para las operaciones de rescate y salvamento en aguas profundas. Otros proyectos estudiaron los drones marinos para la vigilancia y la recogida de datos científicos.
Aaron Marburg, ingeniero eléctrico e informático que trabaja en UUVs en el Laboratorio de Física Aplicada de la Universidad de Washington, señala que los océanos del mundo están en gran medida fuera del alcance de los buques con tripulación.
«La naturaleza de los océanos es que sólo podemos ir allí con robots»
«Para explorar esas regiones inexploradas, estamos obligados a resolver los problemas técnicos y hacer que los robots funcionen»
Aaron Marburg
Uno de los primeros UUV se encuentra en el pasillo de la oficina de Marburg: el Vehículo de Investigación Submarina Autopropulsado, o SPURV, desarrollado en el laboratorio de física aplicada a finales de los años 50. El objetivo original del SPURV era recoger datos sobre las propiedades físicas del mar, en particular la temperatura y la velocidad del sonido.
A diferencia de Charlie, con su forma de pez, SPURV tenía una forma de torpedo utilitario más acorde con su misión. Con poco más de 3 metros de longitud, podía sumergirse hasta 3.600 metros, tenía una velocidad máxima de 2,5 m/s y funcionaba durante 5,5 horas con un paquete de baterías. Los datos se grababan en una cinta magnética y posteriormente se transferían a una grabadora de tiras de papel fotosensible o a otro medio compatible con el ordenador y luego se trazaban con un IBM 1130.
Con el paso del tiempo, la instrumentación de SPURV se hizo más capaz y el alcance del proyecto se amplió. En un estudio, por ejemplo, SPURV llevaba un fluorímetro para medir la dispersión del colorante en el agua, como apoyo a los estudios de estela. El proyecto tuvo tanto éxito que se desarrollaron más SPURV, hasta completar casi 400 misiones cuando terminó en 1979.
Trabajar con robots submarinos, dice Marburg, significa equilibrar los riesgos técnicos y los objetivos de las misiones con las limitaciones de financiación y otros recursos. El apoyo a la investigación puramente especulativa en este ámbito es escaso. El objetivo, pues, es construir UUVs que sean sencillos, eficaces y fiables.
«Nadie quiere escribir un informe a sus financiadores diciendo: «Lo siento, las baterías se agotaron y perdimos nuestro pez robot de un millón de dólares en una corriente»
Aaron Marburg
Un pez robot llamado SoFi
Desde el SPURV, se han desarrollado muchos otros vehículos submarinos no tripulados, de diversas formas y tamaños y para diversas misiones, en Estados Unidos y otros países. Los UUV y sus primos autónomos, los AUV, se utilizan ahora de forma rutinaria para la investigación científica, la educación y la vigilancia.
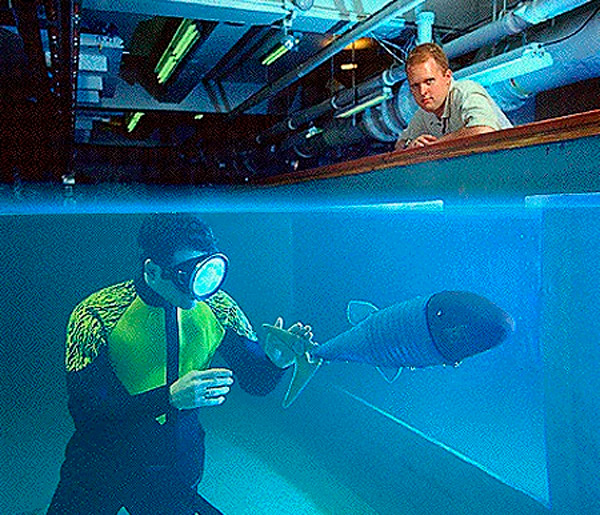
Al menos algunos de estos robots se han inspirado en los peces. A mediados de la década de 1990, por ejemplo, los ingenieros del MIT trabajaron en un RoboTuna, también apodado Charlie. Basado en un modelo de atún de aleta azul, tenía un sistema de propulsión que imitaba la aleta caudal de un pez real. Esto suponía un gran cambio con respecto a los tornillos o hélices utilizados en UUVs como el SPURV. Pero este Charlie nunca nadó por su cuenta, sino que siempre estuvo atado a un banco de instrumentos.
El siguiente trabajo del grupo del MIT, un RoboPike llamado Wanda, superó esta limitación y nadó libremente, pero nunca aprendió a evitar chocar con los lados de su tanque.
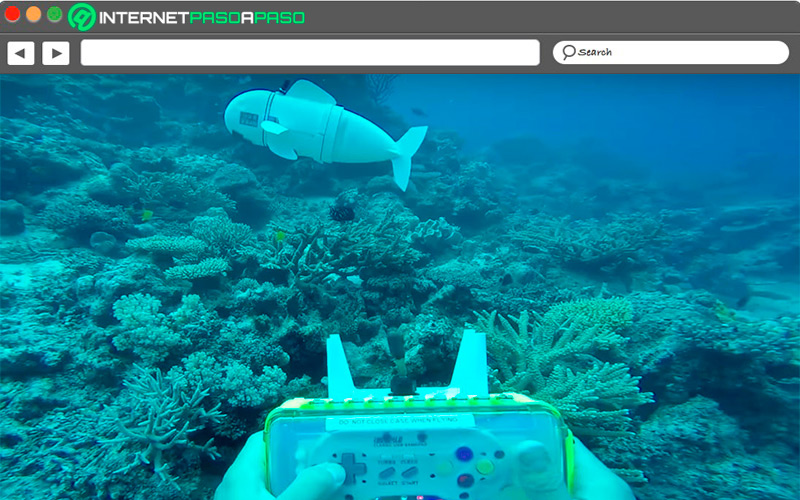
En 25 años, un equipo del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT ha presentado a SoFi, un robot mucho más «piscívoro», diseñado para nadar junto a peces reales sin molestarlos. Controlado por una consola de Super Nintendo adaptado, SoFi puede sumergirse más de 15 metros, controlar su propia flotabilidad y nadar hasta 40 minutos entre cargas de batería.
SoFi, Wanda y los 2 Charlies son ejemplos de biomimética, un término acuñado en 1974 para describir el estudio de los mecanismos, procesos, estructuras y sustancias biológicas. La biomimética se basa en la naturaleza para inspirar el diseño.
A veces, la tecnología resultante es más eficaz que su homóloga natural (discutible al menos), como descubrió Richard James Clapham mientras investigaba peces robóticos para su doctorado en la Universidad de Essex, en Inglaterra. Bajo la supervisión del experto en robótica, Huosheng Hu, Clapham estudió el movimiento de natación del Cyprinus carpio, la carpa común.
A continuación, desarrolló 4 robots que incorporaban la natación de la carpa, el más capaz de todos era el iSplash-II. Cuando se probó en condiciones ideales (es decir, en un tanque de 5 metros de largo, 2 metros de ancho y 1,5 metros de profundidad) iSpash-II obtuvo una velocidad máxima de 11,6 longitudes de cuerpo por segundo (o unos 3,7 m/s). Eso es más rápido que una carpa real, que tiene una velocidad máxima media de 10 cuerpos por segundo. Pero el iSplash-II no llegó a alcanzar el rendimiento máximo de un pez que se lanza rápidamente para evitar a un depredador.
Por supuesto, una cosa es nadar en una piscina de pruebas o en un lago plácido, y otra sobrevivir a la dureza de una ola rompiendo. Esto último es algo que la robotista Kathryn Daltorio ha explorado en profundidad.
Daltorio, profesora adjunta de la Case Western Reserve University y codirectora del Center for Biologically Inspired Robotics Research, ha estudiado los movimientos de cucarachas, lombrices de tierra y cangrejos en busca de pistas para construir mejores robots.
Tras observar cómo un cangrejo navegaba desde la playa de arena hasta las aguas poco profundas sin que una ola lo desviara de su curso, se inspiró para crear un robot anfibio con patas cónicas y curvadas que pudieran clavarse en la arena. Este diseño permitió a su robot soportar fuerzas de hasta el 138% de su peso corporal.
En sus diseños, Daltorio sigue la famosa máxima del arquitecto Louis Sullivan: la forma sigue a la función. No trata de imitar la estética de la naturaleza (su robot sólo se parece de pasada a un cangrejo), sino la mejor funcionalidad. Observa cómo los animales interactúan con su entorno y «roba» las mejores ideas de la evolución adaptativa animal.
Sin embargo, Daltorio admite que también hay lugar para los peces robóticos de aspecto realista, porque pueden captar la imaginación y despertar el interés por la robótica, así como por la naturaleza. Y, a diferencia de un humanoide hiperrealista, es poco probable que un pez robótico caiga en el espeluznante valle de lo insólito.
Ryomei Engineering, una filial de Mitsubishi Heavy Industries, ha desarrollado varios robots: un celacanto robótico, un koi dorado robótico y una carpa robótica. El celacanto se diseñó como herramienta educativa para acuarios, para presentar un espécimen realista de un pez raramente visto que a menudo sólo se conoce por su registro fósil.
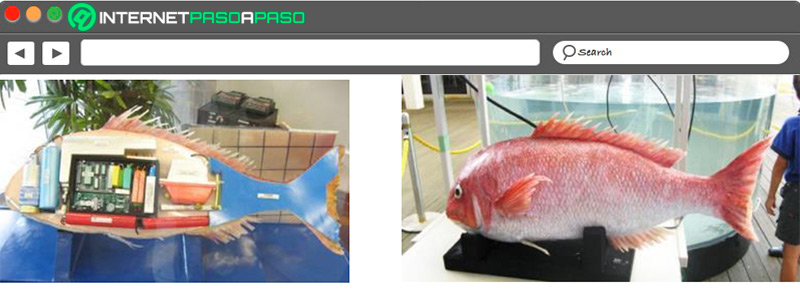
Por su parte, los ingenieros de la Universidad de Kitakyushu (Japón) crearon el Tai-robot-kun, un besugo de aspecto creíble. Y un equipo de Evologics, con sede en Berlín, ideó la mantarraya BOSS.
Sea cual sea su propósito oficial, estas robocriaturas inspiradas en la naturaleza pueden inspirarnos a su vez. Los UUVs que abren nuevas y maravillosas perspectivas en los océanos del mundo pueden ampliar la capacidad de exploración de la humanidad.